Artistic Prosthetic
Dec 11th, 2017 by pann
Robot arms are used widely in industries and manufacturing to replace repetitive actions and tasks. The Artistic Prosthetic is aimed to allow individuals who have a tremor disorder to make art with a robot arm. The final product would be able to draw concentric circles of different sizes and be able to switch pens to create full colored patterns.
Research and Background
McKinsey Global Institute projects that by 2030, 800 million global jobs will be lost to automation. With the age of blue-collar workers seemingly coming to a close, we wanted to look at how we could build a companion robot to enhance the work of humans as opposed to replace it, and attempt to stop the resignation of a large swath of people to uselessness.
The main question that arises from this objective is: how can we develop a low-cost utility that enhances a humans productivity to the point that it is more economically viable to keep the worker than to replace them with some form of automation? This is a huge problem to tackle, and we decided to invert the standard process to find some insight. Instead of developing a use case and following up with a solution, we started with a rough solution that, through interaction and conversation, would lead us to the correct problem.
Initial Concepts:
With a modular robot arm, a wide range of tasks can be done. Mainly very repetitive and tedious tasks can be accomplished with an automated robot.
Our initial idea for the use of a robotic arm was using it to aid the action of soldering. The task of soldering requires an extremely steady hand and normal helping hands are often inaccurate, thus a robot arm that can be easily controlled could be very useful in the soldering process. The device could be valuable to a wide range of individuals, including those with disabilities such as a tremor disorder.
A robotic arm could also bring a new dimension to the world of rapid prototyping, and that was one of our primary concepts for this project – a clay sculpting robot arm. The automotive industry relies heavily on clay modeling, as do a number of other design professions, but the labor input to develop a visualization is immense. The goal of this concept is to greatly reduce the lead time on any given design idea to allow the designer more time to focus on iteration and refinement.
After a few user interviews, we found that the previous two concepts of implementing the robot arm were good, however the actions of soldering and molding clay were two that were not very universal. One user suggested that painting and drawing is a task that covers a larger demographic of users. Making a robot that could be used as a tool to make art would reinforce human agency in an innately human activity, and might be a strong approach to tackling our problem.
Prototype Fabrication
The initial parts were sourced from Thingiverse, thing: 1015238. The parts were printed on a Creality CR-10 out of PLA +. This robot arm uses four servo motors and a lot of screws and nuts. With four servos, this gives the robot four degrees of freedom. With three degrees of freedom, and an all plastic construction, the robot arm has significant limitations when it comes to picking up objects. However, this is the most rudimentary robot arm that can be built, and with better motors, and materials, more tasks can be completed with the arm. The parts were printed, assembled, and all the motors were tested in sequence, from which the first full embodiment was built.


An Arduino was used to control each of the four servos. A circuit was programmed to read the sensor data from four potentiometers. The potentiometer reading is from 0-1023, and this value was mapped to the servo angle value from 0-180 degrees. The value from the potentiometer is then continuously updating the servo angles, allowing the user who is turning the potentiometers to control the movement of the robot arm.



User Experience Mapping
User Mapping was a great way of storying boarding how the user would interact with the product. For our mapping, the user is a child named Timmy, who has a tremor disorder and he cannot keep his hand still. Timmy is a hobbyist and loves to play with RC cars and boats. He occasionally has to solder, and always needs help from his father to solder for him because of his unsteady hand.

Timmy even injures himself because of his unsteady hand, and handling machine equipment and tools.

Timmy tried a regular helping hand, however it can only do static holding and cannot do steady dynamic movements. Timmy comes across a product that is the Robot Soldering Helping hand, and he purchases it.
With this new robot soldering helping hand, Timmy can do precise dynamic movements with the controller of the robotic arm. This allows Timmy to solder and decreases his dependence on others to help him.

This user experience map allowed for us to develop a design cycle that would incorporate user needs and technical specifications for our defined use case. We began with Professor Eglash’s Analysis / Allocation design process and personalized it.
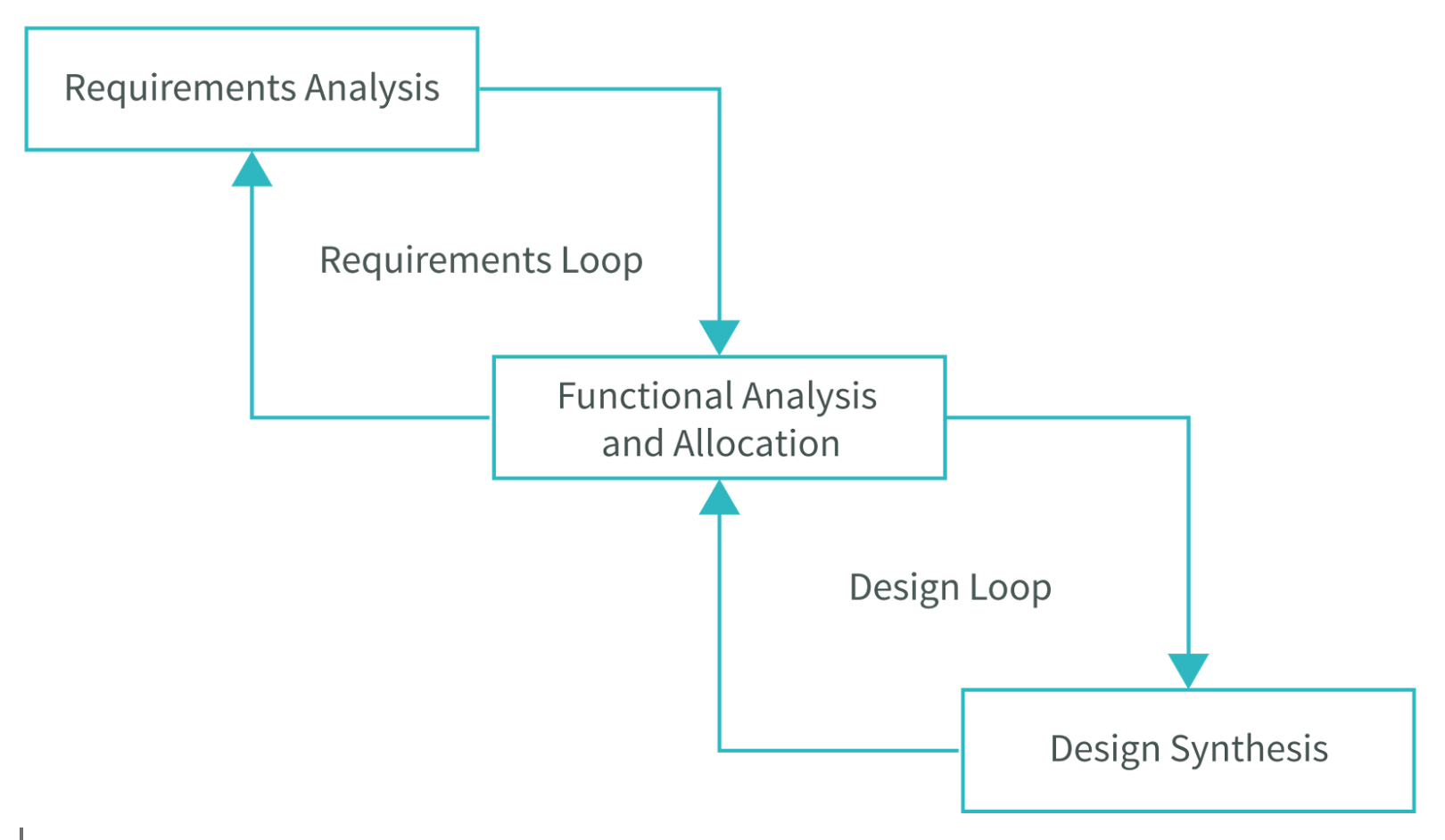
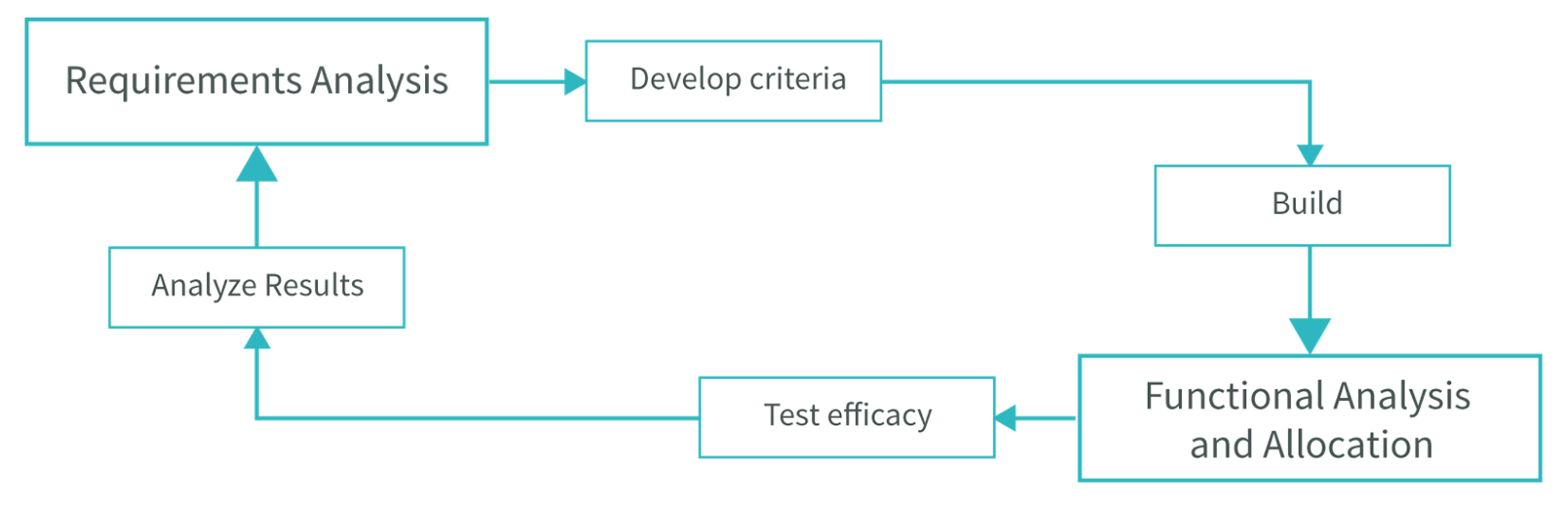
Expanding the requirements loop, we developed criteria that drove the software development, tested it and refined the options.
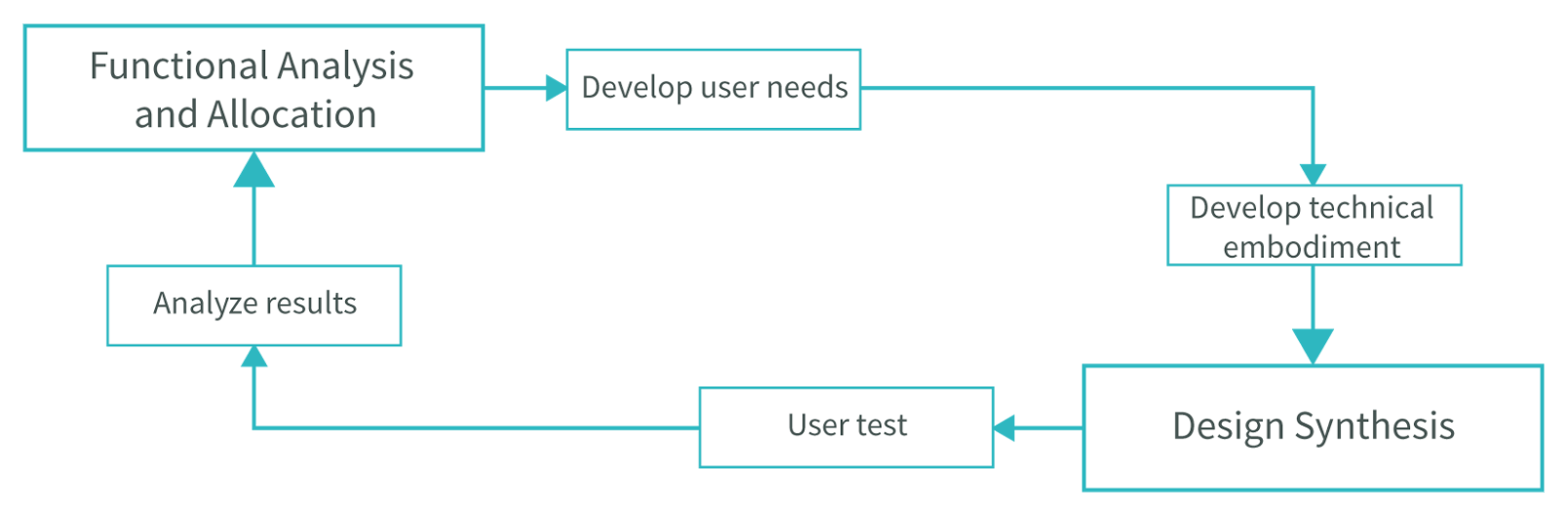
With the functionality in place, we created what we expected were our user’s needs, adjusted the code and hardware, and got it in front of a bunch of users. This is where we currently are in the process, and the next steps are to take our user feedback and iterate on our initial concept.
User Testing
This product went through two iterations of user testing: internal and external. For the internal testing, our PDI fellows had about an hour and a half to play with the robot arm. We got a lot of positive feedback in terms of how cool it was, but when attempting to get the arm to do something, there was a lot of trouble. The grabber arm didn’t grab things that were too wide or had too low of a friction interaction, and the potentiometers regularly popped out, causing the arm to jerk one way or another. That said, we collected some valuable information about ways to improve the next embodiment.
We then took the robot arm over to the ECSE department at RPI, and had a few embedded electronics experts play with it. The summary of those tests are provided in the following tables.

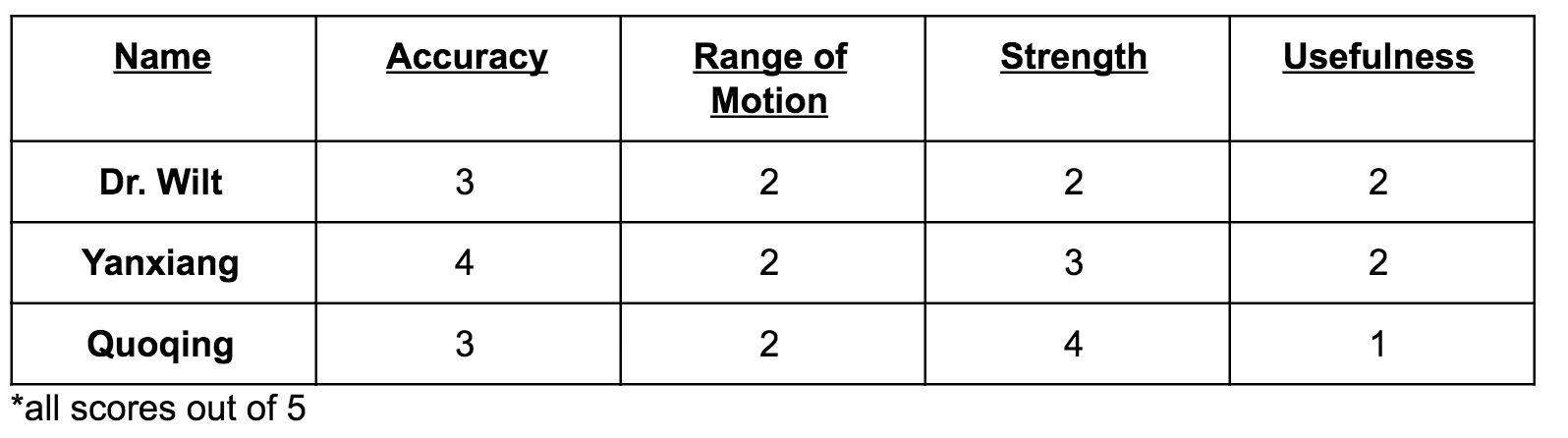
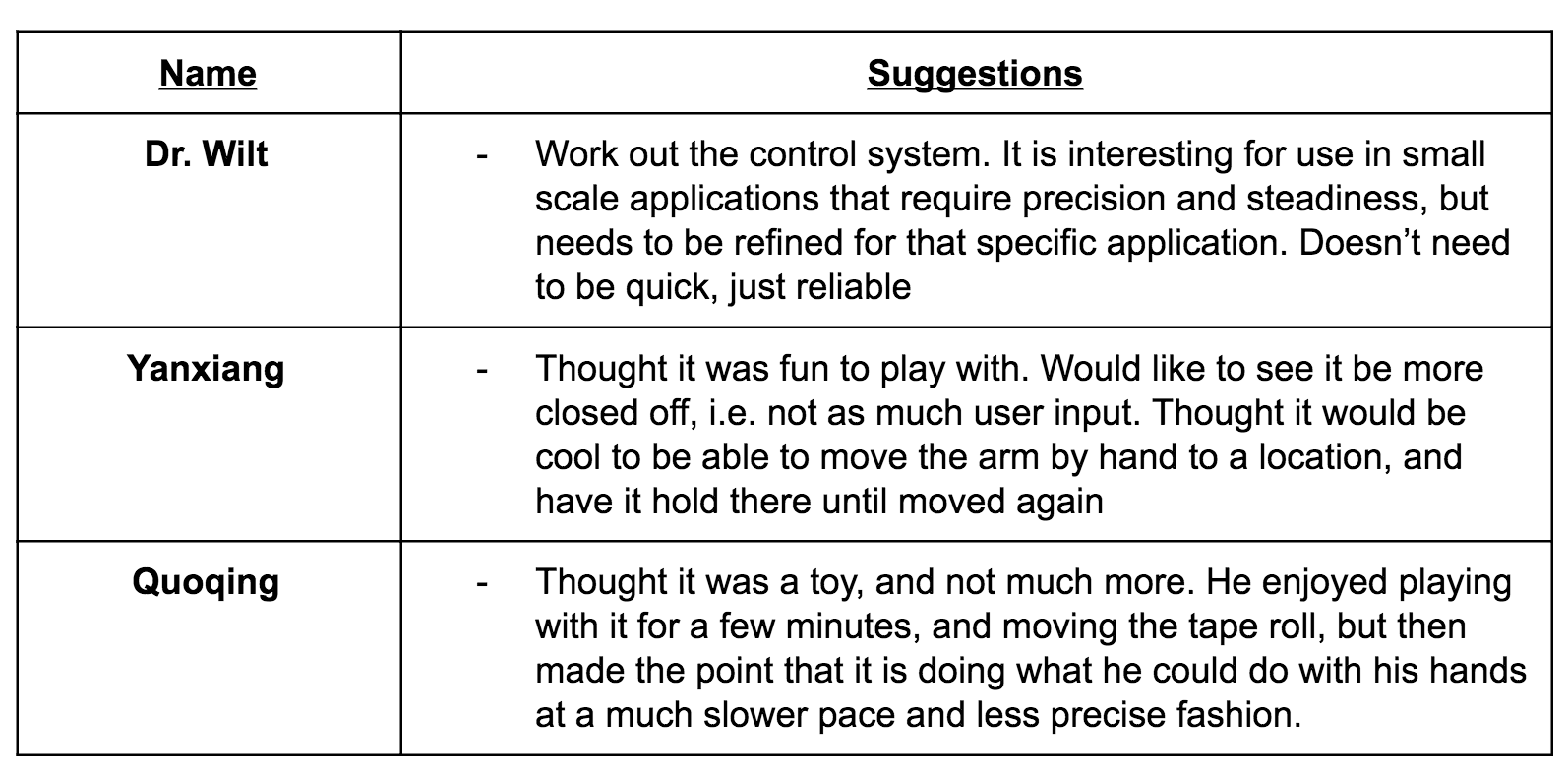
The biggest takeaway here is the notion of current usefulness, which was regularly in question. Francine was able to do some arc drawing, and thought the device could be a highly useful product for quick drawing and ideation if the modes of interaction were adjusted to be less dependent on the user’s input. As well, Yanxiang provided an interesting concept, wherein you may be able to manipulate the arm by physically grabbing it and moving it, at which point it will hold until moved again. However, the latter would not be exceedingly useful for individuals that are disabled by some form of tremor disorder.
What Professor Wilt suggested was highly valuable. He suggested introducing a more intuitive controller, such as a joystick, for operation, and spending most of our time refining the code such that the device moves and reacts to input slower and more precisely. In so doing, we retain the opportunity to provide a range of people, disabled or not, a useful robotic helping hand.
Improvements and Future Iterations
For this first prototype, a major improvement that can be done is to install a stepper motor onto the base of the robot, allowing for 360 degrees of movement. Then by installing a drawing tool on the tip, the robot would be able to make circles of different sizes.The potentiometers installed were also very small, making it hard for the user to control the movement of the robot arm. The potentiometers would also disconnect very easily, making the robot servo motor value increase to the maximum or minimum, creating a very jerky movement. By implementing the servo and coupling that with a joystick controller, the robot arm could be a valuable piece of technology for artistic creation.
From user testing, the feedback stated that at this point of the prototype, the robot arm is a device that has the potential to solve people’s problems, however still requires significant refinement, as well as a clearly defined direction. With better materials, such as laser-cut wood or CNC machined metal, and stepper motors, the robot arm can be constructed to serve the original purpose of creating concentric circles and different shapes that the user can define and manipulate, as well as achieve the precision that would provide individuals that are disabled a tool to assist in their creations.
Future iterations would also include more axes of rotation so that a range of tasks can be done, not only creating artistic drawings. The next steps are to define a specific direction to take the product, improve upon the software controls and hardware implemented, and repeat user testing to move through a few more iterations.